from numpy import *
from sympy import *
from fractions import Fraction as f
set_printoptions(precision=3,suppress=True)
def printm(a):
"""Prints the array as strings
:a: numpy array
:returns: prints the array
"""
def p(x):
return str(x)
p = vectorize(p,otypes=[str])
print(p(a))
def tableau(a,W=7):
"""Returns a string for verbatim printing
:a: numpy array
:returns: a string
"""
if len(a.shape) != 2:
raise ValueError('verbatim displays two dimensions')
rv = []
rv+=[r'|'+'+'.join('{:-^{width}}'.format('',width=W) for i in range(a.shape[1]))+"+"]
rv+=[r'|'+'|'.join(map(lambda i: '{0:>{width}}'.format("x"+str(i+1)+" ",width=W), range(a.shape[1]-2)) )+"|"+
'{0:>{width}}'.format("-z ",width=W)+"|"
'{0:>{width}}'.format("b ",width=W)+"|"]
rv+=[r'|'+'+'.join('{:-^{width}}'.format('',width=W) for i in range(a.shape[1]))+"+"]
for i in range(a.shape[0]-1):
rv += [r'| '+' | '.join(['{0:>{width}}'.format(str(a[i,j]),width=W-2) for j in range(a.shape[1])])+" |"]
rv+=[r'|'+'+'.join('{:-^{width}}'.format('',width=W) for i in range(a.shape[1]))+"+"]
i = a.shape[0]-1
rv += [r'| '+' | '.join(['{0:>{width}}'.format(str(a[i,j]),width=W-2) for j in range(a.shape[1])])+" |"]
rv+=[r'|'+'+'.join('{:-^{width}}'.format('',width=W) for i in range(a.shape[1]))+"+"]
print('\n'.join(rv))
Exercise 1¶
Find all basic feasible solutions. Find a basis $B$ of size m, s.t. $x_B=A^{-1}_Bb\ge 0$, so $A_B$ must be non-singular.
Create all 3-combinations of 7 numbers. This is the set of all possible B's
Check if $A_B^{-1}$ exist.
$x_B=A^{-1}_Bb$ each $x_i\ge0$ for $i\in B$.
from scipy.linalg import *
from itertools import *
from numpy import *
A = array([[2,0,1,-4],[0,1,0,2],[0,0,1,0]])
I = identity(3)
A = concatenate([A,I],axis=1)
b = array([3,1,1])
for e in combinations(range(7),3):
if(det(A[:,e]) != 0):
x = dot(inv(A[:,e]),b)
if(any(x<0)==False):
print("_______________________")
print()
print("B =",e)
print("x =",x)
Exercise 2¶
$\bullet$ We add the slack variables $x_4,x_5,x_6$ with $I=\{1,...,6\}$ and the equational standard form will be:
The LP model:
$\begin{aligned} \text{max} & \qquad 2x_1+4x_2-x_3 & \\ \text{s.t} & \qquad 2x_1-x_3+x_4 = 6 & \\ & \qquad 3x_2-x_3+x_5 = 9 & \\ & \qquad x_1+x_2+x_6 = 4 & \\ & \qquad x_i \ge 0 & \forall i \in \{1,...,6\} \\ \end{aligned}$
The first simplex tableau:
| _ | $x_1$ | $x_2$ | $x_3$ | $x_4$ | $x_5$ | $x_6$ | $-z$ | $b$ |
|---|---|---|---|---|---|---|---|---|
| $x_4$ | 2 | 0 | -1 | 1 | 0 | 0 | 0 | 6 |
| $x_5$ | 0 | 3 | -1 | 0 | 1 | 0 | 0 | 9 |
| $x_6$ | 1 | 1 | 0 | 0 | 0 | 1 | 0 | 4 |
| _ | 2 | 4 | -1 | 0 | 0 | 0 | 1 | 0 |
$\bullet$ $x_2$ has a reduced cost $>0$. Then the pivot column: 2. We find $r$ :
$r = argmin_i \left\{ \frac{b_i}{a_{is}}: \ a_{is}>0 \right\}$
print(9/3)
print(4/1)
Then $r=3$ which is $i=2$ and the we have pivot row: 2.
from numpy import *
A = array([[f(2,1),0,-1,1,0,0,0,6],[0,3,-1,0,1,0,0,9],[1,1,0,0,0,1,0,4],[2,4,-1,0,0,0,1,0]])
tableau(A)
A[1,:]=f(1,3)*A[1,:]
A[2,:]=A[2,:]-A[1,:]
A[3,:]=A[3,:]-4*A[1,:]
tableau(A)
$ \bullet$ This is the optimal solution since the reduced costs are non-positive.
print(6/2)
print(1/1)
Pivot: Column: 1, row: 3
A[0,:]=A[0,:]-2*A[2,:]
A[3,:]=A[3,:]-2*A[2,:]
tableau(A)
$x_1=1$
$x_2=3$
$x_3=0$
$x_4=4$
$x_5=0$
$x_6=0$
$z = 14$
Exercise 3¶
A=array([[2,f(3,1),1,1,0,0,0,5],[4,1,2,0,1,0,0,11],[3,4,2,0,0,1,0,8],[5,4,3,0,0,0,1,0]])
tableau(A)
Let $x_1$ enter.
$r = argmin_i \left\{ \frac{b_i}{a_{is}}: \ a_{is}>0 \right\}$
Find pivot.
print(5/2)
print(11/4)
print(8/3)
The pivot is column 1 row 1 with value: $r=2$ Let $x_4$ leave.
A[0,:] = f(1,2)*A[0,:]
A[1,:] = A[1,:]-4*A[0,:]
A[2,:] = A[2,:]-3*A[0,:]
A[3,:] = A[3,:]-5*A[0,:]
tableau(A)
Find new pivot. Let $x_3$ enter.
print(f(5,2)/f(1,2))
print(f(1,2)/f(1,2))
So the pivot column is 3 and pivot row is 3 with pivot value $1/2$. Let $x_6$ leave.
A[2,:]=2*A[2,:]
A[0,:]=A[0,:]-f(1,2)*A[2,:]
A[3,:]=A[3,:]-f(1,2)*A[2,:]
tableau(A)
$x_1 = 2$
$x_3 = 1$
$x_5 = 1$
$z = 13$
Exercise 4¶
Initial soluition of simplex is $x_1,x_2=0$, the clairvoyant rule say we should take the shortests path. If we take $x_2$ into basis we get a path of 4 arcs.
If we put $x_1$ into basis, we get a path of 6 arcs.
Exercise 5¶
Let $I=\{A,B,C,D,E,F\}$ be the set of activities. Let $x_i$ be the amount of weeks we want to shorten activity $i$. Let $y_i$ be the earliest activity $i\in I$ can start. Let $y_{end}\le 19$ denote the ending activity. The objective is to minimize the cost of shortening the duration of each activity. Let $d_i$ be the normal time that activity $i$ starts, then we add the constraints: $y_j\ge y_i+(d_i-x_i)$ for each arc $i\rightarrow j$ such that activity $j$ cannot start before all predecessors $i$ have finished.
The LP model:
$\begin{aligned} \text{min} & \qquad 6x_A+10x_B+8x_D+8x_E+3x_F & \\ \text{s.t} & \qquad y_C \ge y_A+(7-x_A) & \\ & \qquad y_C \ge y_B+(10-x_B) & \\ & \qquad y_D \ge y_A+(7-x_A) & \\ & \qquad y_D \ge y_B+(10-x_B) & \\ & \qquad y_E \ge y_C+5 & \\ & \qquad y_E \ge y_D+(3-x_D) & \\ & \qquad y_F \ge y_C+5 & \\ & \qquad y_F \ge y_D+(3-x_D) & \\ & \qquad y_{end} \ge y_E+(8-x_E) & \\ & \qquad y_{end} \ge y_F+(7-x_F) & \\ & \qquad y_{end} \le 19 & \\ & \qquad x_A \le 2 & \\ & \qquad x_B \le 5 & \\ & \qquad x_C \le 0 & \\ & \qquad x_D \le 2 & \\ & \qquad x_E \le 2 & \\ & \qquad x_F \le 3 & \\ & \qquad x_i \ge 0 & \forall i \in I \\ & \qquad y_i,y_{end} \ge 0 & \forall i \in I \\ \end{aligned}$
from pyscipopt import *
import numpy as np
m = Model("activity")
c = [6,10,0,8,8,3]
b = [2,5,0,2,2,3]
ir = range(6)
# ir = [A,B,C,D,E,F]
# ir = [0,1,2,3,4,5]
jr = range(7)
x = {}
y = {}
# Variables
for i in ir:
x[i] = m.addVar(vtype = "C", name = "x(%s)" % i)
for j in jr:
y[j] = m.addVar(vtype = "C", name = "x(%s)" % j)
# Objective
m.setObjective(quicksum(c[i]*x[i] for i in ir),"minimize")
# Constraints
# C
m.addCons(y[2] >= y[0]+(7-x[0]))
m.addCons(y[2] >= y[1]+(10-x[1]))
# D
m.addCons(y[3] >= y[0]+(7-x[0]))
m.addCons(y[3] >= y[1]+(10-x[1]))
# E
m.addCons(y[4] >= y[2]+5)
m.addCons(y[4] >= y[3]+(3-x[3]))
# F
m.addCons(y[5] >= y[2]+5)
m.addCons(y[5] >= y[3]+(3-x[3]))
# end
m.addCons(y[6] >= y[4]+(8-x[4]))
m.addCons(y[6] >= y[5]+(7-x[5]))
m.addCons(y[6] <= 19)
for i in ir:
m.addCons(x[i]<=b[i])
m.addCons(x[i]>=0)
for j in jr:
m.addCons(y[j]>=0)
m.optimize()
print("obj: ", m.getObjVal())
print()
for j in jr:
print("y[%s] = %s" % (j,m.getVal(y[j])))
print()
for i in ir:
print("x[%s] = %s" % (i,m.getVal(x[i])))
Exercise 6¶
1.: 4. In nD, it takes n intersecting hyperplanes to get a point.
2.: Yes.
3.: When the planes are linearly independent.
4.: At least the amount variables, which is $n$.
5.: Not if the vertex is outside the feasible region.
6.: Yes. For example in 3D if we have a pyramid formed by 4 constraints.
7.: No.
$x_1+x_2$
$x_1+x_2\le 1$
8.: A cube in 3-dimensional we need $3n=3*2=6$ constraints which have $2^n=2^3=8$ vertices. For an $n-hypercube$ we need $2n$ constraints and $2^n$ vertices.
9.: The upper bound is ${m \choose n}=\frac{m!}{n!(m-n)!} $
10.: True, False, False.
11.: At most two can be different from zero, since we have two constraints.
Both constraints are active.
At most m
$n-m$, at most $m<n$ products
12.: Since $x_4=0$ is the slack variable of the second constraint it is active.
13.: 3 constraints would be active.
14.: True
15.: Then one basic variable is zero. Can draw 2D for:
$x_1+x_2\le 1, \ x_1\le 1, \ x_i \ge 0$
16.:
For 2 dimensions: they have 1 constraint in common.
For 3 dimensions: they have 2 constraints in common.
For n dimensions: they have $ n-1$ constraints in common.
Then we need $n-1$ common variables in basis.
(3*2)/(2*(3-2))
A=array([[f(1,1),1,1,0,0,1],[1,0,0,1,0,1],[1,1,0,0,1,0]])
tableau(A)
A[1,:]=A[1,:]-A[0,:]
A[2,:]=A[2,:]-A[0,:]
tableau(A)
$x_1=1$
$x_2=0$
$x_3=0$
$x_4=0$
Exercise 7¶
Thm 2.5: If the simplex fails to terminate, then it must cycle. Proof. A tableau is determined by which var. is in base and which are not. There are ${n+m \choose m}$ possibilites, hence finite. Then it will terminate if it does not cycle.
Then it cycles use Blend's rule to prevent this. Choose lowest index for entering variable and leaving.
Exercise 8¶
a.
A point is feasible if it is inside the feasible region.
A point is basic if there are the same amount of active constrainst as there are variables.
The points:
$i:$ is feasible.
$ii:$ is feasible.
$iii:$ is basic and feasible.
$iv:$ is basic.
b.
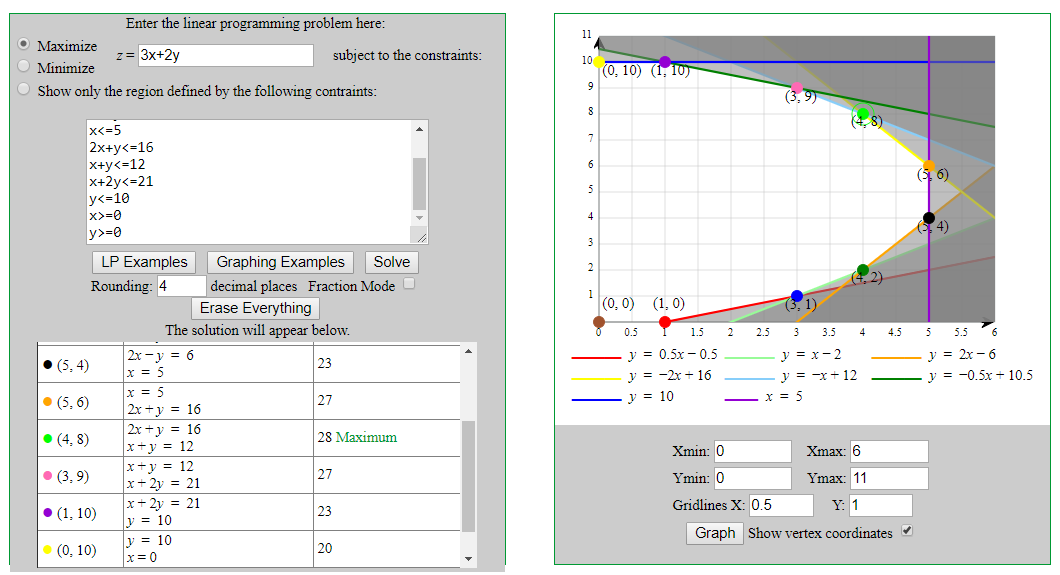
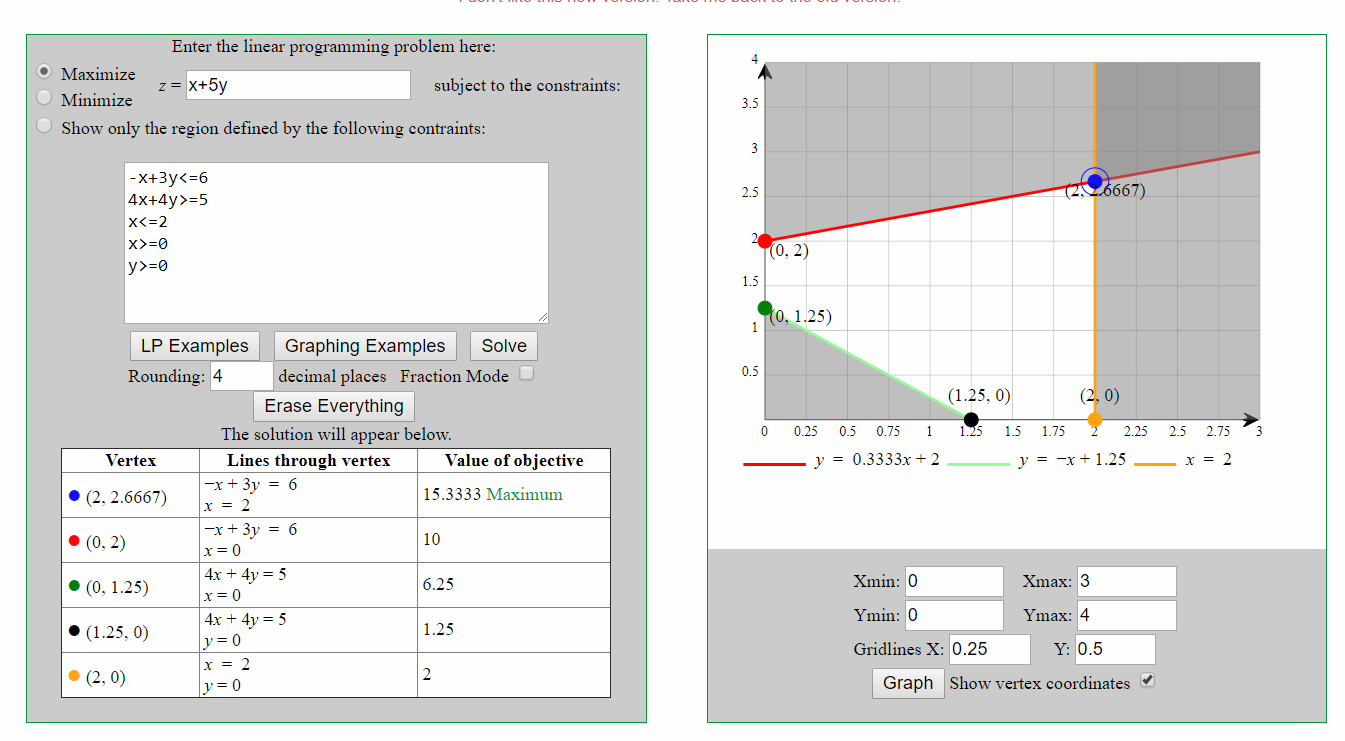
The LP model:
$\begin{aligned} \text{max} & \qquad z=x_1+5x_2 & \\ \text{s.t} & \qquad -x_1+3x_2 \le 6 & \\ & \qquad -4x_1-4x_2 \le -5 & \\ & \qquad x_1 \le 2 & \\ & \qquad x_i \ge 0 \\ \end{aligned}$
The basic solution is:
$x_1=0$
$x_2=0$
$x_3=6$
$x_4=-5$
$x_5=2$
$z=0+5*0=0$ it is not feasible and not optimal. Since the second constraint is violated.
A=array([[-1,3,1,0,0,0,6],[-4,-4,0,1,0,0,-5],[1,0,0,0,1,0,2],[1,5,0,0,0,1,0]])
tableau(A)
c.
$\bullet$ Largest coefficient consider $x_2, x_4$. With $x_2$ having largest coefficient we pick it. $x_1$ leaves.
A=array([[0,f(4,1),1,-f(1,4),0,0,f(29,4)],[1,1,0,-f(1,4),0,0,f(5,4)],[0,-1,0,f(1,4),1,0,f(3,4)],[0,4,0,f(1,4),0,1,-f(5,4)]])
tableau(A)
print(f(29,4)/4.)
print(f(5/4)/1.)
A[0,:]=A[0,:]-4*A[1,:]
A[2,:]=A[2,:]+A[1,:]
A[3,:]=A[3,:]-4*A[1,:]
tableau(A)
A[0,:]=f(4,3)*A[0,:]
A[1,:]=A[1,:]+f(1,4)*A[0,:]
A[3,:]=A[3,:]-f(5,4)*A[0,:]
tableau(A)
A[0,:]=A[0,:]+f(16,3)*A[2,:]
A[1,:]=A[1,:]+f(1,3)*A[2,:]
A[3,:]=A[3,:]-f(8,3)*A[2,:]
tableau(A)
It takes three steps.
$\bullet$ Largest increase: We are still considering $x_2,x_4$.
For $x_2$ the increase will be $\text{min}\left\{\frac{29/4}{4}, \frac{5/4}{1}\right \}*4 = 5$
For $x_4$ the increase will be $\text{min}\left \{\frac{3/4}{1/4} \right \}*1/4 = 3/4$.
This means that $x_2$ is entering and $x_1$ is leaving.
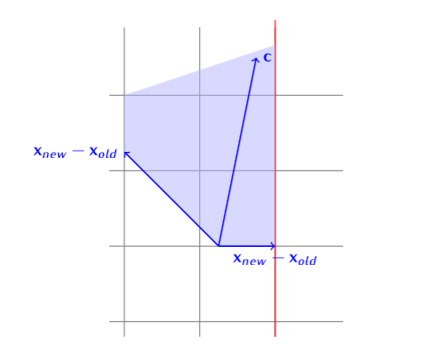
$\bullet$ Steepest edge
None of the rules are convenient, since they all take three steps. If we instead let $x_4$ enter and $x_5$ leave we reach the optimal solution in two steps.
A=array([[0,f(4,1),1,-f(1,4),0,0,f(29,4)],[1,1,0,-f(1,4),0,0,f(5,4)],[0,-1,0,f(1,4),1,0,f(3,4)],[0,4,0,f(1,4),0,1,-f(5,4)]])
tableau(A)
A[2,:]=4*A[2,:]
A[0,:]=A[0,:]+f(1,4)*A[2,:]
A[1,:]=A[1,:]+f(1,4)*A[2,:]
A[3,:]=A[3,:]-f(1,4)*A[2,:]
tableau(A)
A[0,:]=f(1,3)*A[0,:]
A[2,:]=A[2,:]+4*A[0,:]
A[3,:]=A[3,:]-5*A[0,:]
tableau(A)
Exercise 9¶
A = array([[0,f(1,1),1,0,0,5],[-1,1,0,1,0,1],[2,1,0,0,1,0]])
tableau(A)
The first is unbounded since the first column has positive reduced cost but no positive $a_{ij}$ term.
A = array([[f(5,1),10,1,0,0,60],[4,4,0,1,0,40],[1,1,0,0,1,0]])
tableau(A)
Let $x_2$ enter the basis.
print(60/10)
print(40/4)
Then $x_3$ leaves.
A[0,:]=f(1,10)*A[0,:]
A[1,:]=A[1,:]-4*A[0,:]
A[2,:]=A[2,:]-A[0,:]
tableau(A)
Let $x_1$ enter.
print(6/f(1,2))
print(16/2)
Let $x_4$ leave.
A[1,:]=f(1,2)*A[1,:]
A[0,:]=A[0,:]-f(1,2)*A[1,:]
A[2,:]=A[2,:]-f(1,2)*A[1,:]
tableau(A)
Optimal with $x_1=8, x_2=2, z=10$. We can see that $x_3$ have reduced cost 0. If we let $x_3$ enter and let $x_2$ leave.:
A[0,:]=5*A[0,:]
A[1,:]=A[1,:]+f(1,5)*A[0,:]
tableau(A)
Optimal with $x_1=10, x_3=10, z=10$
Convex combination:
$ x_1 = 8a+10(1-a)$
$ x_2 = 2a$
$ x_3 = 10(1-a)$
$ x_4 = 0$
Exercise 10¶
a. Since we have a negative b value, then $x_3=1, x_4=1$ is not feasible.
The LP model:
$\begin{aligned} \text{max} & \qquad z=4x_2 & \\ \text{s.t} & \qquad -2x_2+x_3 = 0 & \\ & \qquad 3x_1-4x_2+x_4 = -1 & \\ & \qquad x_i \ge 0 \\ \end{aligned}$
Make b positive.
$\begin{aligned} \text{max} & \qquad z=4x_2 & \\ \text{s.t} & \qquad -2x_2+x_3 = 0 & \\ & \qquad -3x_1+4x_2-x_4 = 1 & \\ & \qquad x_i \ge 0 \\ \end{aligned}$
from numpy import *
from fractions import Fraction as f
set_printoptions(precision=3,suppress=True)
def printm(a):
"""Prints the array as strings
:a: numpy array
:returns: prints the array
"""
def p(x):
return str(x)
p = vectorize(p,otypes=[str])
print(p(a))
def tableau1(a,W=7):
"""Returns a string for verbatim printing
:a: numpy array
:returns: a string
"""
if len(a.shape) != 2:
raise ValueError('verbatim displays two dimensions')
rv = []
rv+=[r'|'+'+'.join('{:-^{width}}'.format('',width=W) for i in range(a.shape[1]))+"+"]
rv+=[r'|'+'|'.join(map(lambda i: '{0:>{width}}'.format("x"+str(i+1)+" ",width=W), range(a.shape[1]-3)) )+"|"+
'{0:>{width}}'.format("-z ",width=W)+"|"+
'{0:>{width}}'.format("-w ",width=W)+"|"
'{0:>{width}}'.format("b ",width=W)+"|"]
rv+=[r'|'+'+'.join('{:-^{width}}'.format('',width=W) for i in range(a.shape[1]))+"+"]
for i in range(a.shape[0]-1):
rv += [r'| '+' | '.join(['{0:>{width}}'.format(str(a[i,j]),width=W-2) for j in range(a.shape[1])])+" |"]
rv+=[r'|'+'+'.join('{:-^{width}}'.format('',width=W) for i in range(a.shape[1]))+"+"]
i = a.shape[0]-1
rv += [r'| '+' | '.join(['{0:>{width}}'.format(str(a[i,j]),width=W-2) for j in range(a.shape[1])])+" |"]
rv+=[r'|'+'+'.join('{:-^{width}}'.format('',width=W) for i in range(a.shape[1]))+"+"]
print('\n'.join(rv))
b. Phase I of the auxiliary problem:
The LP model:
$\begin{aligned} \text{max} & \qquad w^*=-x_5 & \\ \text{s.t} & \qquad -2x_2+x_3 = 0 & \\ & \qquad -3x_1+4x_2-x_4+x_5 = 1 & \\ & \qquad x_i \ge 0 \\ \end{aligned}$
A = array([[0,-2,f(1,1),0,0,0,0,0],[-3,4,0,-1,1,0,0,1],[0,4,0,0,0,1,0,0],[0,0,0,0,-1,0,1,0]])
tableau1(A)
Turn it into canonical form
A[3,:]=A[3,:]+A[1,:]
tableau1(A)
The basis consists of $x_3, x_5$.
$x_3=0$
$x_5=1$
c.
i) Not feasible. Since the second constraint is violated: $-3*0+4*0=0\ge 1$
ii) $x_5=1, z=-1$ and there are reduced cost with positive value, so no.
iii) Yes, $x_3=0$ is a basic variable.
iv) It will terminate since the simplex terminates.
v) It will not be feasible if for the original problem the feasible region is empty.
vi) Let $x_2$ enter and $x_5$ leave.
A[1,:]=f(1,4)*A[1,:]
A[0,:]=A[0,:]+2*A[1,:]
A[2,:]=A[2,:]-4*A[1,:]
A[3,:]=A[3,:]-4*A[1,:]
tableau1(A)
Since $w^*=0$ we have a starting feasbile solution for the original problem.
$x_2=1/4$
$x_3=1/2$
We move to phase II by removing last row and columts $x_5,-z$.
A = A[:-1,[0,1,2,3,5,7]]
tableau(A)
For the first column have positive reduced cost but no positive $a_{ij}$ term, then the problem is unbounded.