DM204 – Scheduling, Timetabling, Routing
Assignment Sheet 1, Fall 2010
[pdf format]
|
Prepare for discussion in class at 10.00 of Wednesday,
February 17 as many of these exercises as you can. Proceed in the
presentation order.
Preface to exercises 1 to 6
In a combinatorial optimization problem (COP) we are typically
given a finite set N={1,…,n} of objects, weights cj for each
j∈ N and a set F of feasible subsets of N. The task is
finding a minimum weight feasible subset, that is,
Items 1 to 6 below are COPs that you have to
formulate as a (Linear) Mixed Integer Program, a (Linear) Integer
Program, or a Binary Integer Program.
Make a clear distinction between the data of the problem instance and
the variables (unknowns used in the model). Then, (i) Define what appear
to be the necessary variables; (ii) Use these variables to define a set
of constraints so that the feasible points correspond to the feasible
solutions of the problem; (iii) Use these variables to define the
objective function. If difficulties arise define and additional or
alternative set of variables and iterate. In COPS, we are often
interested in choosing a subset S⊆ N. For this often it helps
using the incidence vector of S, which is the n-dimensional
0–1 vector xS such that xjS=1 if j ∈ S and xjS
otherwise.
- 0–1 Knapsack Problem There is a budget b available for
investment in projects during the coming year and n projects are
under consideration, where aj is the outlay for project j, and
cj is its expected return. The goal is to choose a set of projects
so that the budget is not exceeded and the expected return is
maximized.
- Set Covering Problem (SCP) Given a certain number of regions, the
problem is to decide where to install a set of emergency service
centers. For each possible center the cost of installing a service
center, and which regions it can service are known. For instance if
the centers are fire stations, a station can service those regions
for which a fire engine is guaranteed to arrive on the scene of a fire
within 8 minutes. The goal is to choose a minimum cost set of service
centers so that each region is covered. More abstractly, Let
M={1,…,m} be the set of regions, and N={1,…,n} the
set of potential centers. Let Sj ⊆ M be the regions that
can be serviced by a center at j∈ N, and cj its installation
cost. We obtain the problem: minT⊆ N { ∑j∈ T cj
: ∪j ∈ T Sj = M}.
- Traveling Salesman Problem (TSP). A salesman must visit each of n
cities exactly once and then return to his starting point. The time
taken to travel from city i to city j is cij. Find the order
in which he should make his tour so as to finish as quickly as
possible.
- Uncapacited Facility Location (UFL) Given a set of potential
depots N={1,…,n} and a set M={1,…,m} of clients,
suppose there is a fixed cost fj associated with the use of depot
j and a transportation cost cij if all of client i’s order is
delivered from depot j. The problem is to decide which depots to
open and which depot serves each client so as to minimize the sum of
the fixed and transportation costs.
- Uncapacited Lot-Sizing (ULS)
The problem is to decide on a production plan for an n-period horizon
for a single product. The basic model can be viewed as having data:
- ft is the fixed cost of producing in period t.
- pt is the unit production cost in period t.
- ht is the unit storage cost in period t.
- dt is the demand in period t.
- Job Shop Model Jm | | Cmax in two
ways: with discrete time variables and with continuous time
variables. One of these models leads to disjunctive constraints. Show
how they can be linearized.
- Modelling disjunctions:
- Extend the formulation saw in class for discrete alternatives to
the union of two polyhedra Pk={x ∈ Rn : Ak x ≤
bk, 0 ≤ x ≤ u} for k=1,2, where M≥
maxkmaxi{aikx−bik : 0≤ x ≤ u}
- Extend the formulation at the previous point to model that at of
the constraints ∑j=1n aij xj ≤ bi, i = 1,…,k
at least h<k are satisfied.
- Formulate the following as mixed integer programs:
- (a) u=min{x1,x2}, assuming that 0≤ xj ≤ C for
j=1,2
- (b) v=|x1−x2| with 0≤ xj≤ C, for j=1,2
- (c) the set X∖{x*} where X={x ∈ Zn : Ax≤ b }
and x* ∈ X.
- (d) z=xy, where x,y ∈ B.
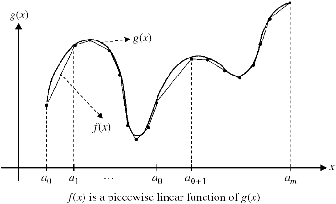
| Figure 1: Piecewise linear function f(x) |
- Piecewise linear functions. Many nonlinear programs can be
piecewisely linearized and modelled as mixed integer
programs. Consider a general nonlinear function g(x) of a single
variable x. g(x) is continuous and x is within the interval
[a0,am]. Let f(x) be a piecewise linear function of g(x),
where the interval [a0,am] is partitioned into m small intervals
via the break points [a0,a1,…,_m], where a0 < a1 < …
< am as shown in Figure 1. Write the MIP program for the
piecewise-linearized problem.